Hardware (BB + Livox Mid-360)¶
The Penelope hardware configuration builds directly on the Barebone Hardware setup, extending it with the Livox Mid-360 LiDAR for high-resolution 3D perception and mapping.
Livox Mid-360 Integration¶
The Livox Mid-360 provides a 360° horizontal field of view with dense point cloud output, making it highly suitable for aerial robotics applications such as SLAM, obstacle detection, and mapping.
For technical specifications, see the Livox Mid-360 Product Page.
Connection Details¶
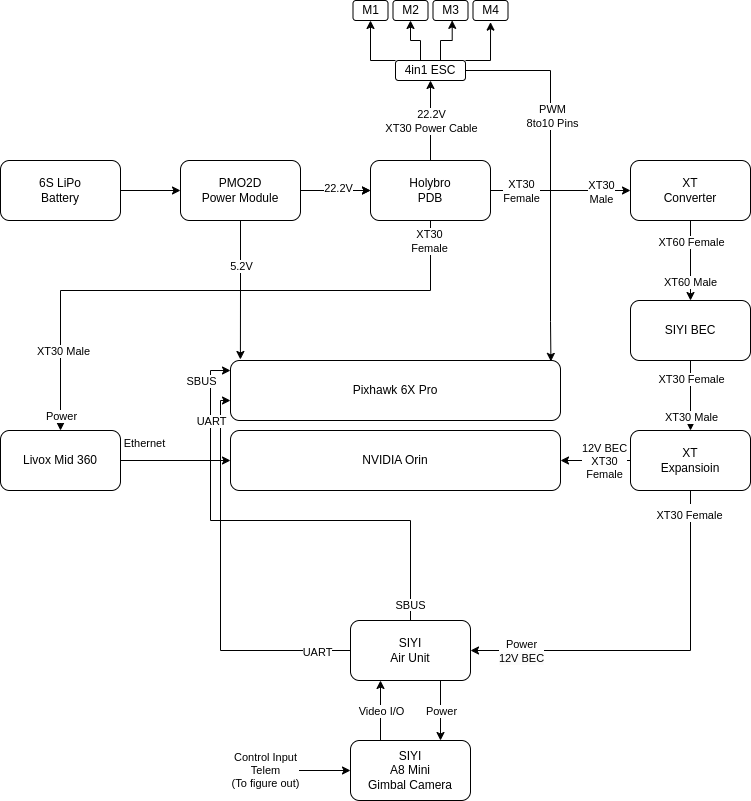
The Livox Mid-360 is connected to the MAVISS Penelope platform using a dedicated 3-in-1 splitter cable provided by Livox.
This cable handles all sensor I/O, broken into three branches:
Power Cable → connected to the 3-in-1 UBEC (replacing the AC1 connection) to provide stable and regulated power.
Ethernet Cable → connected directly to the NVIDIA Jetson Orin NX, enabling LiDAR point cloud communication and data transfer.
Function Cable → reserved for time synchronization with other sensors (IMU, GPS, or additional LiDARs), ensuring multi-sensor fusion accuracy.
Wiring Diagram¶
The following diagram illustrates the wiring layout for Penelope:
Integration Notes¶
Ensure the UBEC output voltage matches the Livox Mid-360 input requirements before connecting.
Verify the Jetson detects the LiDAR on Ethernet (
ifconfigorip addrfor network interface check).If using multi-sensor fusion, connect the function/sync cable to your time synchronization unit.
Maintain vibration isolation and secure cable routing to prevent disconnections during flight.
Result:
The Penelope platform achieves barebone stability (BB) + Livox perception (Mid-360), enabling high-resolution 3D mapping and autonomous navigation for MAVISS.