Hardware¶
The barebone platform is the starting point of MAVISS development.
It is a minimal configuration that supports stable GPS-based flight without perception sensors or NVIDIA Jetson integration.
This stage is essential for validating the propulsion system, flight controller, and ground station setup.
Components:
Frame: Basic quadcopter frame supporting 7-inch propellers
Propulsion:
NEEBRC 2806.5 Brushless Motors (1300KV)
HQProp 7x4x3 Propellers
Flight Controller: Holybro Pixhawk 6X Pro
Power System:
6S LiPo Battery
PM02D Power Module
Holybro Power Distribution Board (PDB)
GPS: Holybro H-RTK F9P GNSS
Ground Station: SIYI MK32 Smart Controller
Firmware: PX4 Autopilot with QGroundControl for setup
3D Prints / Body Frame¶
The MAVISS platform uses custom 3D-printed and modular carbon fiber body components.
The design ensures space for mounting companion computers, LiDARs, cameras, and expansion boards.
Top Plate: for mounting Pixhawk, Jetson Orin NX, and power distribution
Middle Frame: vibration-isolated section for LiDAR and camera payloads
Landing Gear: tall legs designed to keep sensors elevated from the ground
Custom Mounts:
SIYI A8 Mini Gimbal Mount
Livox Mid-360 LiDAR Mount
Side arms for antenna & GPS placement
Note: CAD and STL files for MAVISS 3D prints will be hosted in the Maviss-Hardware GitHub Repository.
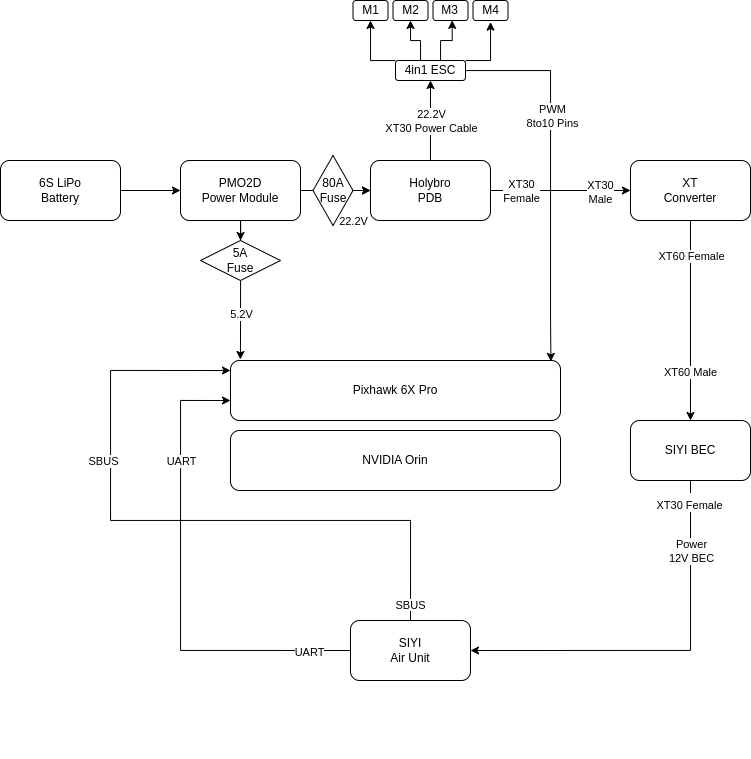
Electronic Diagrams¶
The MAVISS wiring integrates Pixhawk, Jetson Orin NX, GPS, SIYI MK32 and its Air-Unit into a single modular system.
The power distribution ensures stable supply to both flight-critical and perception systems.
Diagram Overview:
Pixhawk 6X Pro: connected to Jetson via UART (MAVLink), SBUS for RC, and GPS input
Jetson Orin NX: powered by XT converter with 12V BEC, handling LiDAR & perception stack
SIYI Air Unit & MK32: UART + SBUS control, powered through dedicated 12V BEC
Drone Assembly¶
The assembly process combines the barebone structure, 3D-printed mounts, and wiring harness into the final MAVISS drone.
Steps:
Assemble frame and mount propulsion system (motors + propellers).
Install Pixhawk 6X with vibration isolation.
Mount GPS on elevated mast for clear satellite visibility.
Add custom 3D-printed mounts for Jetson, LiDAR, and SIYI Gimbal.
Connect electronic wiring per schematic.
Calibrate sensors (accelerometer, magnetometer, GPS, radio) via QGC.
Perform tethered test flight to validate stability.
Result:
A fully assembled MAVISS drone ready for further integration of autonomy and perception systems.